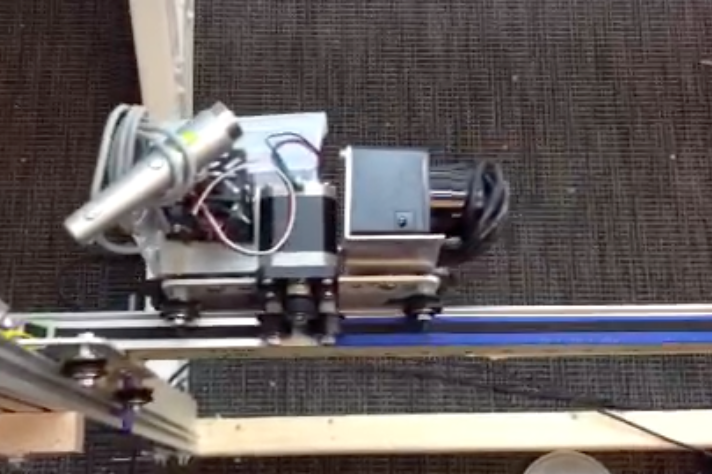
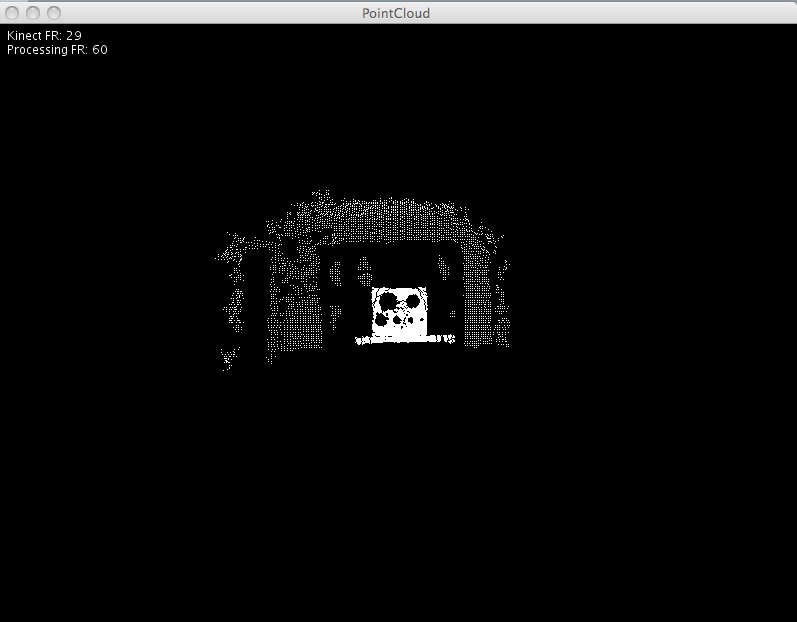
Autoponics is a project I worked on as part of the Advanced Robotics Seminar at the University of Colorado, Boulder. The rest of the team was Daniel Zukowski, Todd Bernhard, Brian Carlsen, and Anuraag Chintalapally. Essentially we were building the beginnings of an automated robotic gardening system. We built out a gantry system that could look at rows of plants and collect sensor data from a laser scanner and high-res document camera. The system was built using MakerSlide, there were two Arduinos controlling 3 stepper motors, 1 Arduino+Stepper for the X-rail carriage, and another Arduino controlling 2 steppers for each side of the (counterweighted) Y-Axis. The control system is written in ROS, which allows us to bring in and visualize 3d point cloud data from the rows of plants. The project website is here.
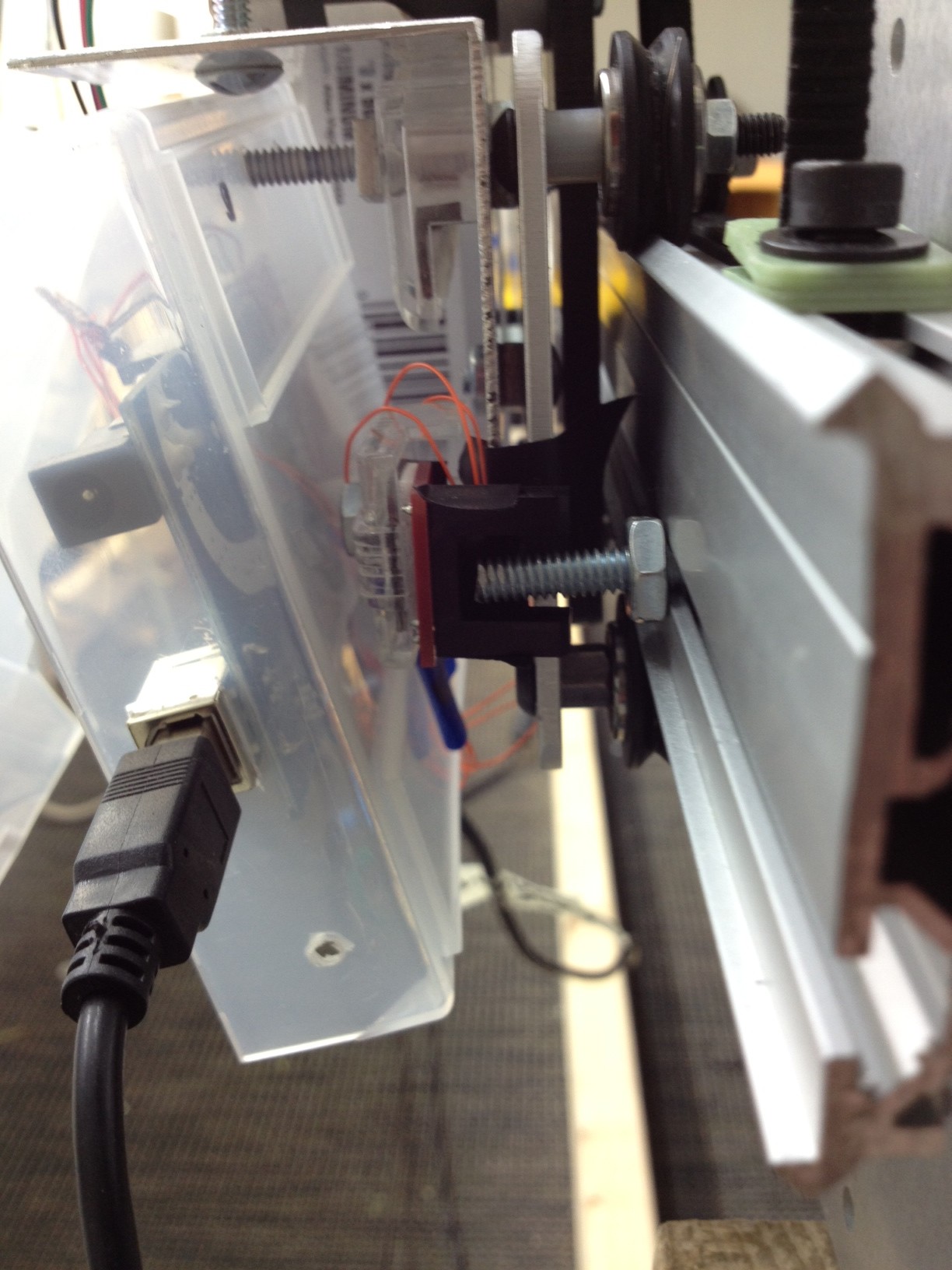
Below is a video of calibration tests we performed on the X-Axis as a percursor to being able to write localization code for the system. The X-carriage is bouncing between 2 screws inserted in the MakerSlide – the carriage has a photo-interrupter on each side, which the screws trigger, thus acting as an end-stop.